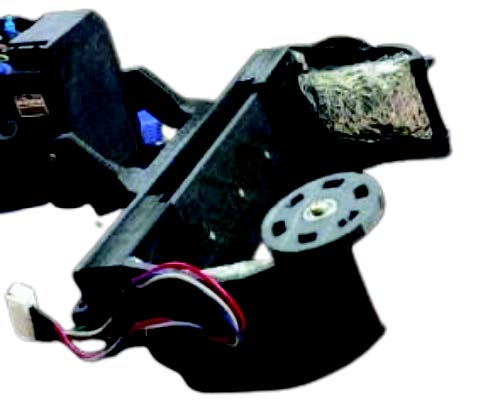
 Utilizamos 4 motores 3-6V para realizar a movimentação do robô. Esses motores são mais lentos, contudo, possuem mais força, auxiliando na subida de rampas e gangorras.
Utilizamos 4 motores 3-6V para realizar a movimentação do robô. Esses motores são mais lentos, contudo, possuem mais força, auxiliando na subida de rampas e gangorras.
 Utilizamos ele para reconhecer a linha e o verde, estabelecendo os valores das cores preto, branco, prata e RGB, para fazer as comparações no código. Fizemos ele com dois sensores de cor (para verde e vermelho), 3 infravermelhos (para preto, branco e prata) e dois LED’s (para haver sempre a mesma iluminação onde os sensores farão a leitura, evitando grandes variações de valores).
Utilizamos ele para reconhecer a linha e o verde, estabelecendo os valores das cores preto, branco, prata e RGB, para fazer as comparações no código. Fizemos ele com dois sensores de cor (para verde e vermelho), 3 infravermelhos (para preto, branco e prata) e dois LED’s (para haver sempre a mesma iluminação onde os sensores farão a leitura, evitando grandes variações de valores).
 Utilizamos 3 sensores ultrassônicos HC-SRO4, no reconhecimento de obstáculos e paredes.
Utilizamos 3 sensores ultrassônicos HC-SRO4, no reconhecimento de obstáculos e paredes.
 Utilizamos 2 chaves fim de curso com rolete para alinhar o robô com as paredes na sala de resgate (junto com o sensor giroscópico), para controlar o número de batidas no triângulo até a bolinha cair da caçamba e para calibrar o Charles.
Utilizamos 2 chaves fim de curso com rolete para alinhar o robô com as paredes na sala de resgate (junto com o sensor giroscópico), para controlar o número de batidas no triângulo até a bolinha cair da caçamba e para calibrar o Charles.
 Utilizamos 4 sensores infravermelhos.
Utilizamos 4 sensores infravermelhos.
Um na garra para reconhecer se as vítimas entraram na nela e no barramento seguidor de linha para reconhecer a linha
 Utilizamos 2 sensores ToF’s para reconhecer as vítimas na lateral, dentro da sala de resgate.
Utilizamos 2 sensores ToF’s para reconhecer as vítimas na lateral, dentro da sala de resgate.
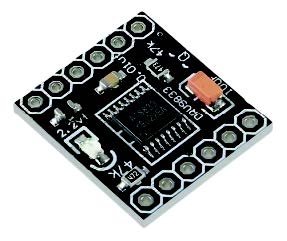 Utilizamos 2 pontes H DRV9833 para fazer o controle de dois dos motores cada uma
Utilizamos 2 pontes H DRV9833 para fazer o controle de dois dos motores cada uma
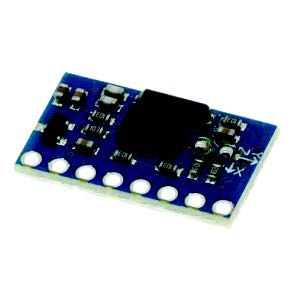 Utilizamos 1 módulo de sensor giroscópico de 9 eixos para alinhar o robô em curvas e dentro
Utilizamos 1 módulo de sensor giroscópico de 9 eixos para alinhar o robô em curvas e dentro
da sala de resgate (alinhando-o com as paredes)